

 联系我们
联系我们

日本安川 MOTOMAN 多 关节小型机器人,通过对此6关节小型机器人进行运 动学正、逆解的模拟仿真,得到机器人运动学正、逆解 算法,再借助安川机器人为深度开发用户提供的计算 机通讯软件包 MOTOCOM32完成对机器人的实时控 制和操作。

1 机器人电弧焊接快速成型系统
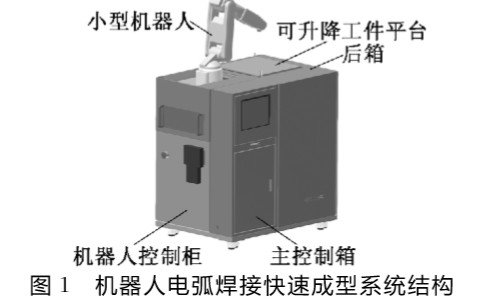
机器人电弧焊接快速成型系统的硬件包括小型关节 机器人及其控制柜、可升降工件平台、包含主控电脑及其 扩展模块的主控制箱、焊接电源等,其结构如图1所示。 小型关节机器人与可升降工件平台构成电弧快速 成型运动执行机构;主控制箱中集成有工业控制计算 机和扩展控制模块,以完成设备的中心控制;焊接系统 与主控电脑通过高速通信连接。该系统由于在升降台 下预留设计了冷水槽,因此将冷水槽注水后还可外接 水冷循环设备,从而控制冷水槽中循环水的温度,当快 速成型作业时可将成型件部分浸入水中起到成型过程 中件体快速降温的作用。
使用该系统进行电弧焊接快速成型时,先用常规造型工具如SolidWorks或Autodesk等造型软件制作三维 模型,然后将模型导入该系统控制软件,由控制软件完 成模型分层及路径规划后,将路径数据上传至机器人并 控制机器人进行电弧焊接快速成型,成型过程中同时控 制焊接工艺,在不同位置采用不同的焊接工艺
2 运动学仿真
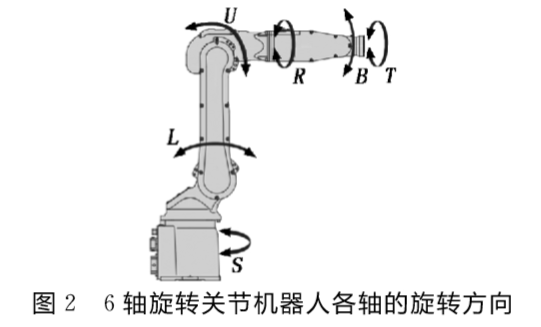
机器人本体采用安川 MOTOMAN-MH5LS小型 6轴旋转关节机器人,其各个轴的旋转方向如图2所 示。其中 S 、 L 、 U 、 R 、 B 、 T 分别表示机器人从主基座 到机器人手臂执行末端的各轴,当焊枪安装于执行器 末端时,焊枪末端的位移与焊枪姿态可由机器人各关 节控制达到。
MOTOCOM32 是日本安川电机公司为其 MOTOMAN系列机器人提供的软件开发工具包,也 即动态链接库文件,包含文件数据传送、机器人控制、 I /O读写信号等功能,用户可通过调用其提供的功能 函数达到与机器人通信或控制的目的。
本文摘自:网络 时间:2022-12-17
- 下一篇:安川机器人-关节式上下料机器人设计
- 上一篇:安川机器人驱动器的主要特点
