

 联系我们
联系我们

MOTOMAN安川工业机器人坐标系详细分析

上图为 MOTOMAN 六关节型机器人,它由腰关节 S、大臂关节 L、小臂关节 U 和腕关节 R, B,T 组成。因而机器人末端执行器的空间位置可以表示为 P(S,L,U,R,B,T),其中 S,L,U,R,B,T为该位置机器人各关节相对于关节零点的坐标。另外,直角坐标系下,位置 P 还可以表示为 P (X,Y,Z,TX,TY,TZ),其中 X,Y,Z 表示 P 点的位置,TX,TY,TZ 表示 P 点的位姿。
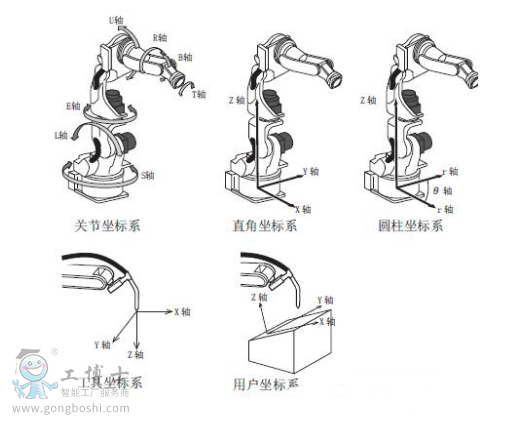
MOTOMAN 内部坐标系有关节坐标系(Joint coordination)、机器人坐标系(Robot coordination)、基坐标系(base coordination)和用户坐标系(User coordination)四种,后三种都是直角坐标系。在示教过程中保存的点都是用关节坐标表示的。用户可以在机器人内部建立自己的用户坐标系,在示教之后,利用内部指令把示教文件(Specified job)转换成用户坐标系下的相对文件(Related job),这样就可以得到示教点在用户坐标系下的坐标了。如此以来,在用户坐标系下,就很方便做一些处理。
本文摘自:网络 时间:2023-10-13
